Laplacian Of Gaussian (Marr-Hildreth) Edge Detector
The following are my notes on part of the Edge Detection lecture by Dr. Shah: Lecture 03 – Edge Detection
-
Noise can really affect edge detection, because noise can cause one pixel to look very different from its neighbors.
-
To account for this, we take advantage of the fact that neighboring pixels along an edge tend to look similar.
-
Gaussian smoothing helps eliminate noise. The larger the sigma, the greater the smoothing.
-
The simplest edge detectors are the Prewit and Sobel edge detectors. These are pretty old.
-
Laplacian of Gaussian (Marr-Hildreth) is better.
-
Even better: Gradient of Gaussian (Canny)
**Prewitt and Sobel: **
-
Compute derivatives in x and y directions.
-
Find gradient magnitude
-
Threshold the magnitude.
Copmuting derivatives:
**First you smooth out the images by averaging with the mask:
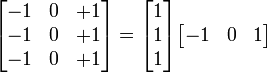
The below image shows the Prewitt mask in the x-direction. The right hand side represents the operator as two operations. The vertical vector represents a smoothing of the image by averaging. The horizontal vector represents the derivative in the x direction. These two operations can be combined into a single mask as shown on the left hand side.
**
**Copmuting the magnitude of the vector incorporates both the the derivative in the x and y direction, and this ensures that we’re able to detect edges at any angle (not just horizontal or vertical edges). ** Marr-Hildreth **The Marr-Hildreth operator is also called the Laplacian of Gaussian, which I saw referenced in SIFT…** **
-
Apply Gaussian smoothing
-
Take the second derivative and look for zero crossings (where 2nd derivative = 0, but is not constant 0)
1. When the first derivative is at a maxima or minima the second derivative is 0.
2. Pixels where a zero crossing occurs are marked as edges (if the slope of the crossing exceeds a threshold).
3. Look for zero crossings along each row (why not by columns, too?)
-
According to Wikipedia, this edge detector is more of historical significance because it has a couple serious flaws, and the Canny edge detector is better.
-
Marr-Hildreth performs the smoothing using the Gaussian instead of just simple averaging. We already know that the Gaussian does a better job of smoothing, so that’s already one improvement.
-
The second order derivative is the Laplacian?
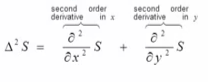

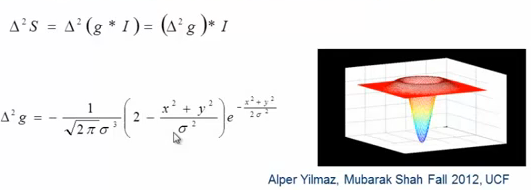
- Rather than convolve the image with the gaussian and take the second order derivative of the result, you can actually take the 2nd derivative of the gaussian itself.
**
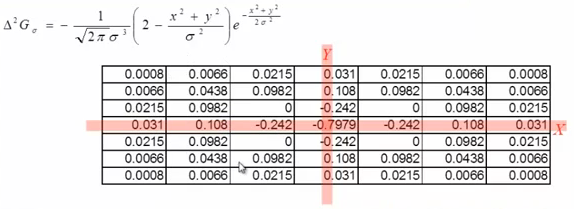
- You can precompute the mask values, as shown below. He generally uses a sigma of 1, so I assume that’s the case here:
** 
[8:14 Lecture 3]
-
Zero crossings occur in the image wherever a positive value is followed by a negative value, or vice versa. Or there may even be a 0 in between a positive and negative value.
- The absolute difference between the negative and positive values gives you the slope of the crossing, which is a measure of the strength of the edge.
-
In the same way that we were able to separate the Gaussian filter to improve performance, we can separate the Laplacian of Gaussian
**
-
The Gaussian filter can be applied with 2n multiplications (where n is the mask size), but the LoG requires 4n.
-
This requires four passes of the image to apply the 1D vectors (with a final fifth pass to sum the results?)